Published
For the first time, an algorithm trained only on synthetic data is able to beat a state-of-the-art network trained on real images for object pose estimation on several objects of a standard benchmark. Learn more here: https://nvda.ws/2CvO2Jy
- Category
- NVIDIA
- Tags
- NVIDIA, Research at NVIDIA, AI Research
Be the first to comment
Up Next
Autoplay
-
02:36

Art of Deep Learning: U.C. Berkeley Researchers Integrate NVIDIA Deep Learning Software into Caffe
-
01:10
Research at NVIDIA: GPU-Accelerated Robotic Simulation for Distributed Reinforcement Learning
-
01:48
Berkeley AI Research (BAIR) Teaches Robot to Interact with Real World Objects
-
13:05
Tutorial: Running YoloV8 Object Detection on Ryzen AI Powered PC
-
1:08:46
NVIDIA Deep Learning Course: Class #1 – Introduction to Deep Learning
-
02:17
Scan Objects into Realistic 3D Models with HP Z and NVIDIA GPUs
-
01:26
Tracking Objects With Surround Camera Vision - NVIDIA DRIVE Labs Ep. 5
-
01:34
Accelerating Deep Learning Research with NVIDIA DGX Station A100
-
03:03
VisionLabs @ GTC Europe 2017 - face recognition, object recognition, AR and VR
-
01:39
Research at NVIDIA: Improving Landmark Localization with a New Deep Learning Architecture
-
01:31

Interactive Visualization of High-Resolution, Global-Scale Climate Data in the Cloud
-
02:20

Generating Potential Accident Scenarios for Autonomous Vehicles Using AI - NVIDIA DRIVE Labs Ep. 27
-
00:34
NVIDIA GTC 2023 Keynote Teaser
-
02:13

Experience Hospitality Design on CloudXR with AWS
-
1:17:52

GTC 2023 Keynote with NVIDIA CEO Jensen Huang
-
02:48

BMW Group Celebrates Opening the World's First Virtual Factory in NVIDIA Omniverse
-
02:31

NVIDIA Omniverse Foundational Technology Montage I GTC Spring 2023 Edition
-
02:03

Amazon Robotics Deploys First Fully Autonomous Robot With NVIDIA Isaac Sim
-
02:04
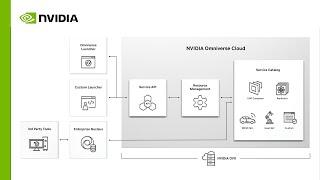
Easily Scale and Unify Industrial Digitalization With NVIDIA Omniverse Cloud
-
03:14

I AM AI | NVIDIA GTC 2023 | Official Keynote Intro